The WSR100-E is an 80GHz FMCW (Frequency Modulated Continuous Wave) radar level transmitter designed for non-contact, high-precision liquid level measurement. Operating in the 76–81 GHz frequency band, it delivers excellent measurement stability and accuracy even in complex outdoor environments.
With its compact design, narrow beam angle, and advanced signal processing technology, the WSR100-E is widely used in rivers, lakes, shoals, reservoirs, and other open water level monitoring applications.
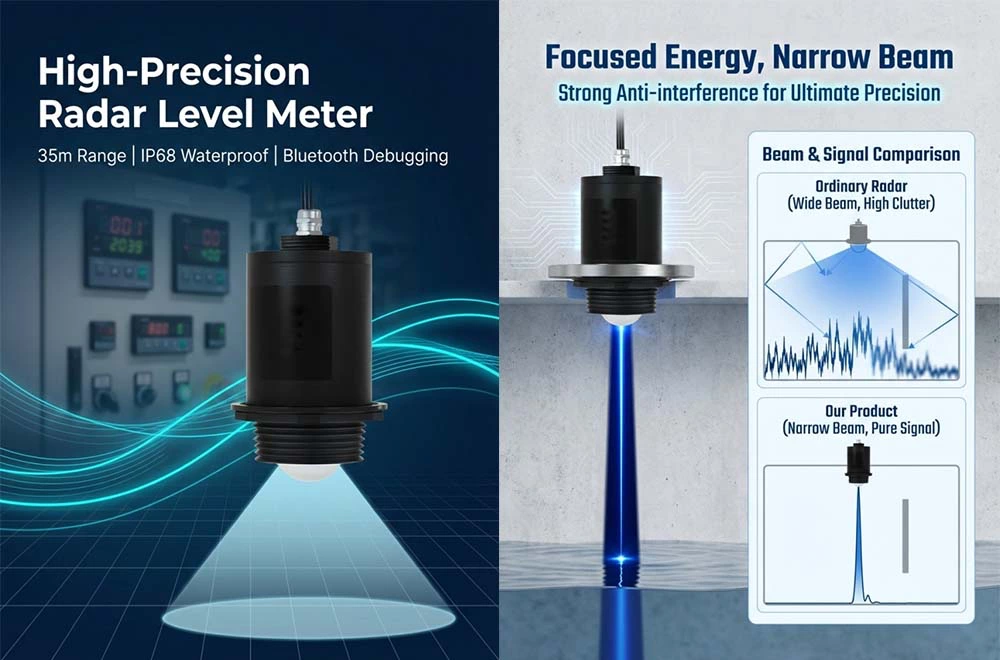
80GHz high-frequency radar technology for high resolution and precise measurement
Narrow beam angle with concentrated energy, offering strong anti-interference capability
High measurement accuracy and excellent signal stability
Compact and lightweight design, easy to install and maintain
Maximum measuring range up to 35 meters
High ingress protection up to IP68, suitable for harsh outdoor environments
Multiple output interfaces for seamless integration with monitoring systems
Bluetooth configuration via mobile phone, convenient for on-site commissioning and maintenance
-
Additional Product Advantages
Stable performance under varying temperature, humidity, and weather conditions
High signal-to-noise ratio ensures reliable measurement even with surface fluctuations
Compact structure reduces installation space requirements
Compatible with multiple output interfaces for easy system integration
The WSR100-E radar level transmitter operates based on the FMCW radar measurement principle.
The radar emits a continuously modulated electromagnetic wave toward the liquid surface. When the wave encounters the medium, it is reflected back and received by the radar antenna. The distance R between the radar installation point and the liquid surface is proportional to the frequency difference Δf between the transmitted and received signals:
R = C × Δf / (2 × K)
Where:
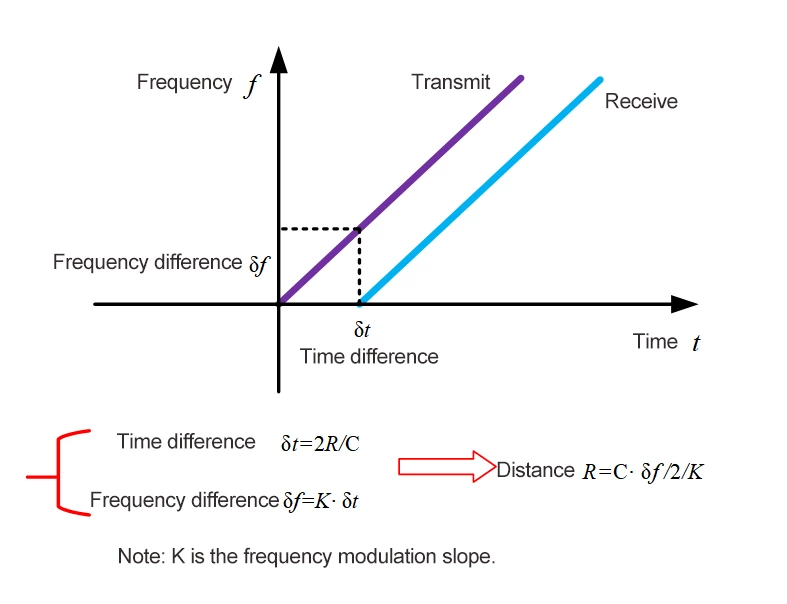
Since C and K are known constants, the distance R can be accurately calculated. By subtracting the measured air distance from the known installation height, the actual liquid level is obtained.
The WSR100-E radar level transmitter is specially designed for open water and outdoor level measurement applications, including but not limited to:
River water level monitoring
Continuous and accurate level measurement for flood control and hydrological analysis.
Lakes and reservoirs
Long-term monitoring of water storage and seasonal level variations.
Shoals and wetlands
Reliable measurement in shallow water environments with changing surfaces.
Flood early warning systems
High stability and fast response for real-time water level monitoring.
Hydrological and environmental monitoring stations
Ideal for unattended measurement in remote or harsh outdoor conditions.
Open channels and irrigation systems
Accurate level measurement for water management and distribution.








